depuis le temps que j'ai ce projet dans un coin de ma tête (3 ou 4 ans peut être), j'ai enfin pu faire mes premiers tours de roues avec mon buggy TT 1/8 brushless, donc à la base thermique converti en électrique.
J'utilise un ensemble contrôleur / moteur Feigao avec accus Lipo Hyperion VZ 4500 mA 30C-50C, le support moteur est un modèle en alu usiné Rc monster, le support d'accus est aussi un Rc monster, les pignons de module 1 sont des Robinson.
Je possède ce châssis depuis des années, il a finalement peu roulé, il est équipé de pas mal d'options et il a quelques modifications spécifiques :
-Châssis Nuova Faor allégé
-Etriers de fusées avant 8° Laffranchi replica en Ergal Fioroni (3 paires vendues en France)
-Fusées avant Ergal Fioroni
-Cales anti cabrage 3° Kyosho
-Support amortisseurs avant Fioroni
-Platine sauve servo Fioroni
-Renforts de châssis Fioroni
-Barre de direction Nuova Faor sur roulements
-Triangles inférieurs alu
-Transmission complète de Truggy STR en acier et à denture hélicoïdale, elle permet de tirer plus court et elle est plus solide
-Visserie titane et alu suivant les endroits
De côté j'ai un diff' Torsen Storm Fioroni qui devrait passer à l'avant.
Le contrôleur est un CBRacing/Feigao 120A et le moteur un 540L sensored (à capteur) 4.5T 4550 Kv, le capteur étant un plus en terme de progressivité et de performance (dixit de nombreux pilotes), le timing est réglé au minimum pour un couple maxi, je vais par la suite tester d'autres moteurs.
Tout est câblé avec des prises PK 6 mm, les prises de l'accus sont détrompées pour éviter toute inversion, vu le coût du matos cette précaution semble indispensable.
Pour que le contrôleur passe 14,8V et un moteur 540L, le BEC intégré est désactivé en retirant la prise rouge (+) qui va au récepteur, il n'alimente donc plus le récepteur ni le servo et peut ainsi passer plus de courant.
Un Ubec ou bec externe se charge d'alimenter le récepteur, il est alimenté par le pack de propulsion et en sortie fournit du 6V, il va directement se brancher sur une voie libre du récepteur.
Pour ce châssis j'avais des exigences :
1-Poids minimum
2-Centre de gravité le plus bas possible
3-Centrage des masses optimal
4-Equilibre droite / gauche optimal
1-Pour le poids le choix des éléments a pas mal joué, en effet dans un premier temps le choix s'est porté sur un moteur 540L à capteur qui ne pèse que 225 g, ce qui est très peu, d'autant que ce moteur est démontable, ventilé et dispose d'une turbine de refroidissement.
Vu les Kv de ce moteur (4550 Kv), je vais tester avec un pack Lipo 3S 11,1V plus léger qu'un 4S.
Certains éléments sont retirés pour gagner du poids :
La platine radio, le système de freinage, la boîte radio, récepteur et Ubec sont positionnés sur le servo de direction collés au double face.
Je me passe de pack de réception en utilisant un Ubec pour alimenter le récepteur, je gagne déjà ça.
Le châssis prêt à rouler avec aileron et carrosserie (et clips) pèse 3,2 Kg ou 3,3 Kg avec accus 3S ou 4S, c'est bien en dessous de la version thermique, ça promet une belle efficacité sur piste.
2-Centre de gravité, pour être au plus bas, le contrôleur est positionné directement sur le châssis et collé au double face entre le servo et le moteur, le servo est couché et fixé avec deux colonnettes en plastique.
Pour être au plus bas le support d'accus est fixé directement au châssis, je n'utilise pas la plaque plastique fournie avec, c'est environ 50 g de gagné et un support au plus bas fixé avec 5 vis parker, le support est au préalable percé avec un foret de 2,5 mm, je reprends deux trous des bavettes.
Rien ne dépasse du support de diff', on ne peut pas faire plus bas.
3-Centrage des masses, le support d'accus est positionné le plus en arrière possible pour charger le train arrière et il est plaqué contre le support de diff' central, le support ne dépasse pas du châssis sur l'arrière, j'ai prévu de faire d'autres trous pour pouvoir avancer le support d'accus pour charger plus le train avant si besoin.
Le servo est positionné le plus au centre possible, ça passe tout juste avec le cardan central avant.
Le contrôleur est contre le servo de direction et contre le support de diff' central.
Les poids est le plus centré possible.
4-Equilibre droite / gauche, chaque élément a été pesé, l'électronique compense parfaitement le poids du pack d'accus.
Assez papoté, place aux photos :
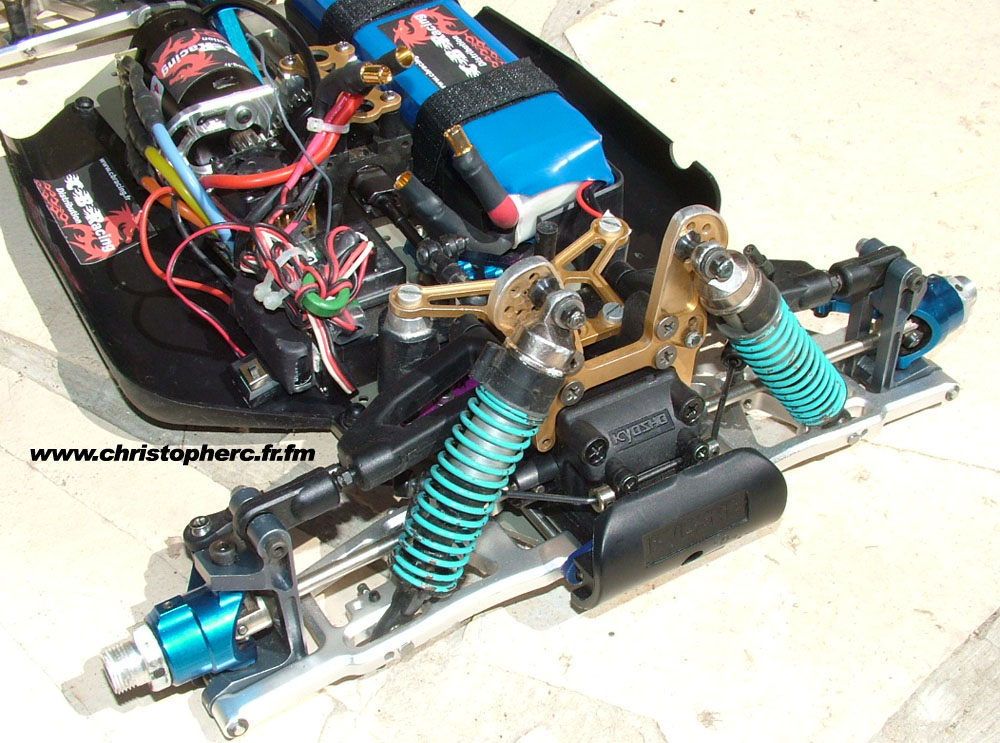
Le train avant tout ergal (fusées/étriers), les étriers retirent de la chasse (soit 8° au lieu de 12° d'origine) pour être plus vif

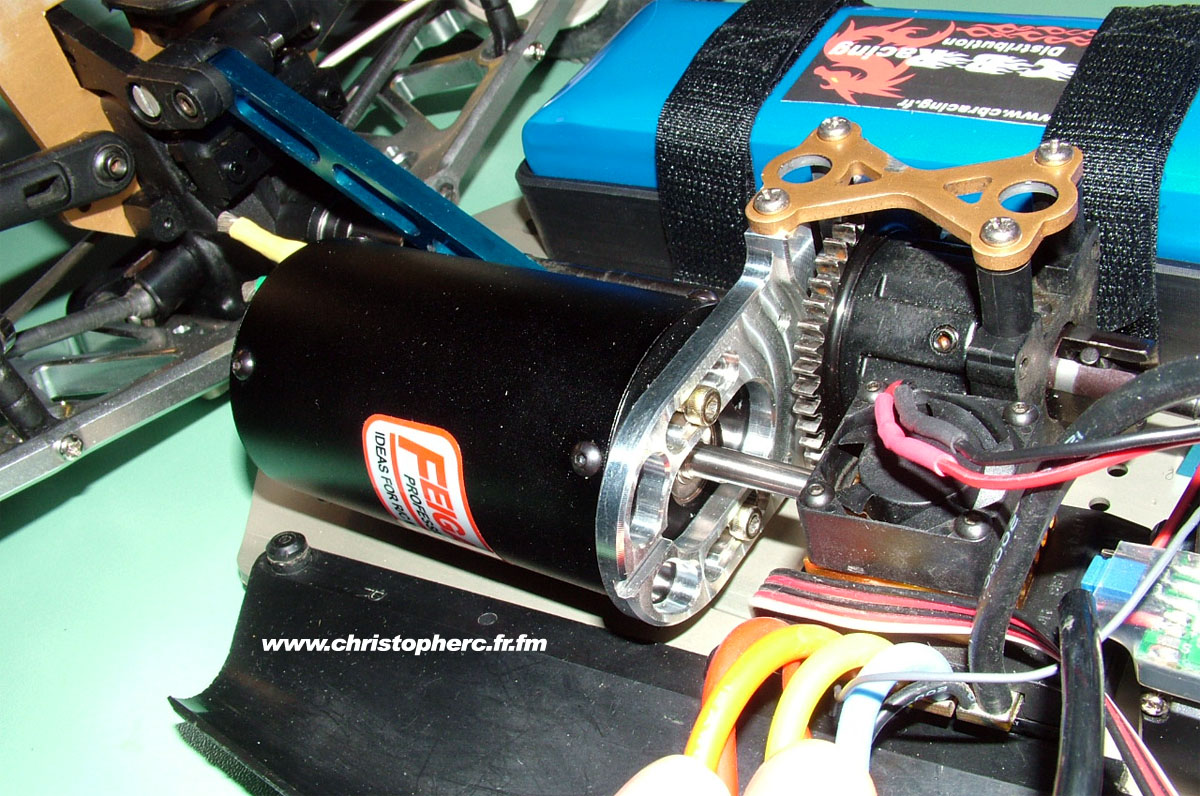
Sur cette photo on voit que le pignon moteur a morflé, il cassera avant la fin du pack ... c'était un pignon que j'avais récupéré dans un lot, par la suite j'ai monté un Robinson, plus de problème, il semble indestructible.

Les câblages sont fixés comme je peux, je pense que je vais tout ressouder pour raccourcir tout ça, côté câbles d'alimentation c'est au plus court, comme d'hab'
J'en ai fait plein d'autres pendant le montage, je le rajouterai à ce sujet pour montrer les étapes du montage
J'ai enfin pu tester cet après midi aussitôt le châssis terminé et bien je dois dire que je ne suis pas déçu !!
J'ai d'abord testé en 3S pour voir, déjà ça marchait super fort, à mon avis déjà plus qu'un thermique.
Ensuite je suis passé au 4S et là SHOWTIME !!!
C'est violent, ça va vite, ça fait des méchants wheelings à pleine vitesse, c'est le pied !
D'après le calculateur de vitesse, la vitesse théorique serait entre 90 et 95 km/h en 4S, ça me semble tout à fait faisable, je vérifierai ça bientôt avec un radar que je recevrai sous peu.
Une vidéo est prévue au plus vite, gnark gnark
Mise à jour :
J'avais pas encore mis de photos de la carrosserie, simple mais facilement repérable en piste :



J'ai donc par la suite monté un 8XL avec radiateur RC Monster pour ne pas que les faces avant et arrière ne se dessertissent sur une réception de saut, en plus ça refroidit mieux, par contre ça rajoute pas mal de poids.
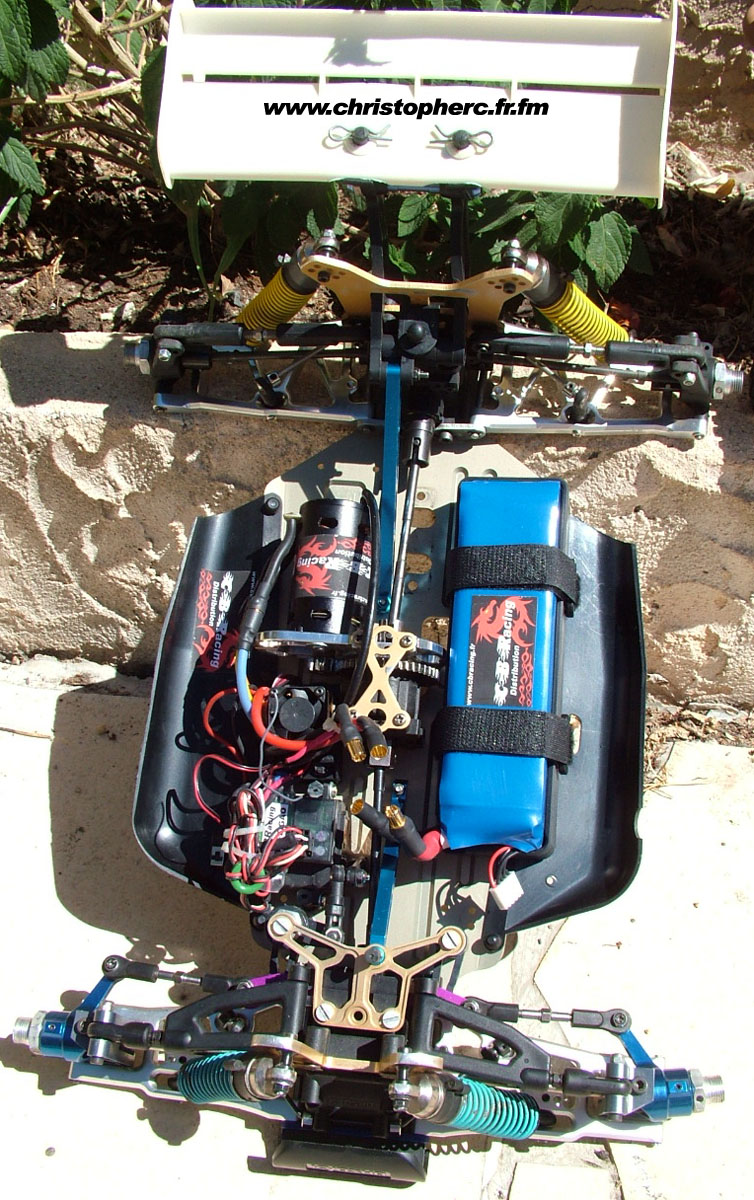
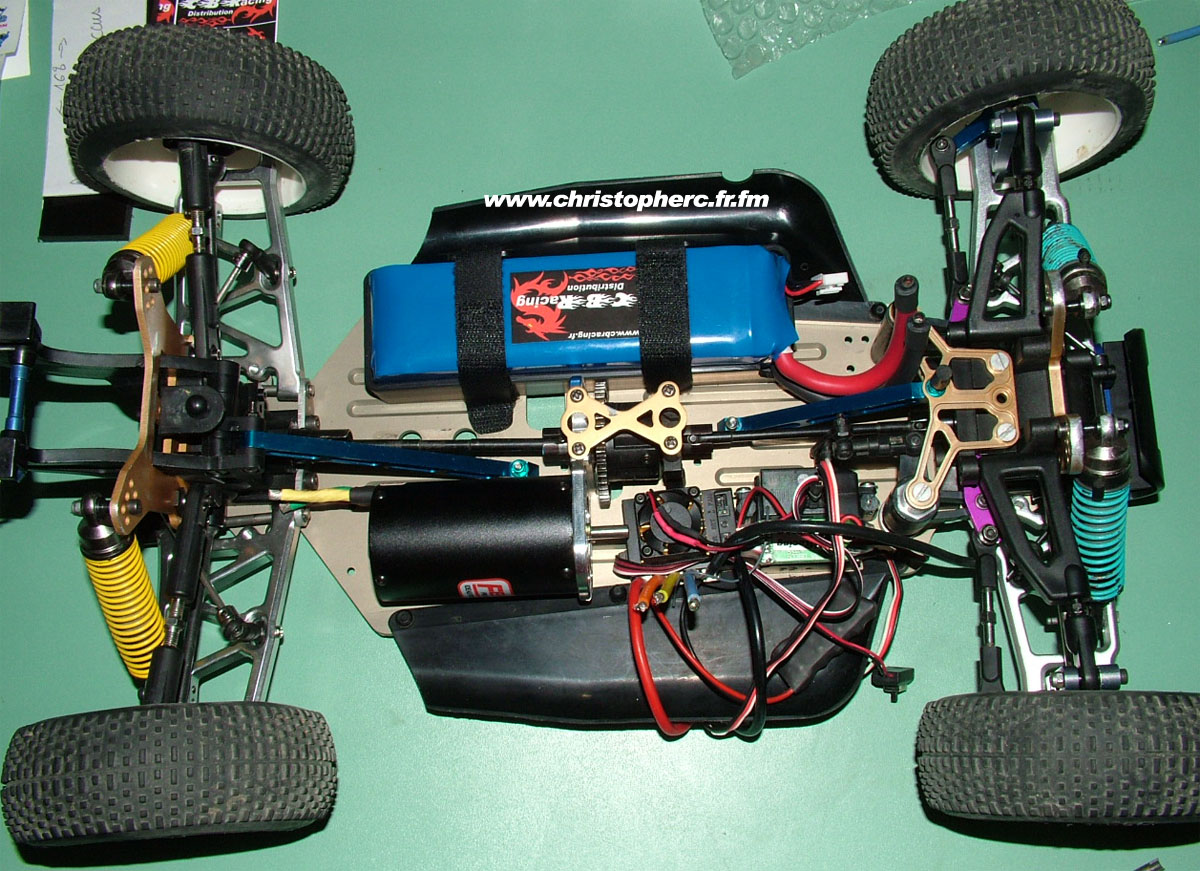
Vue globale du châssis :


Quelques détails qui ont été revus et améliorés ...
Le support d'accus Rc Monster a cassé sur l'avant à force de gros sauts répétés, j'ai donc rajouté un plot en alu pour bloquer le pack, j'en ai profité pour un peu alléger le support et enfin j'ai rajouté un velcro sur l'avant pour maintenir le pack car ça semble indispensable sans quoi ça saute sans cesse :



Le récepteur a désormais sa boite radio maison faite avec un demi boitier RPM :
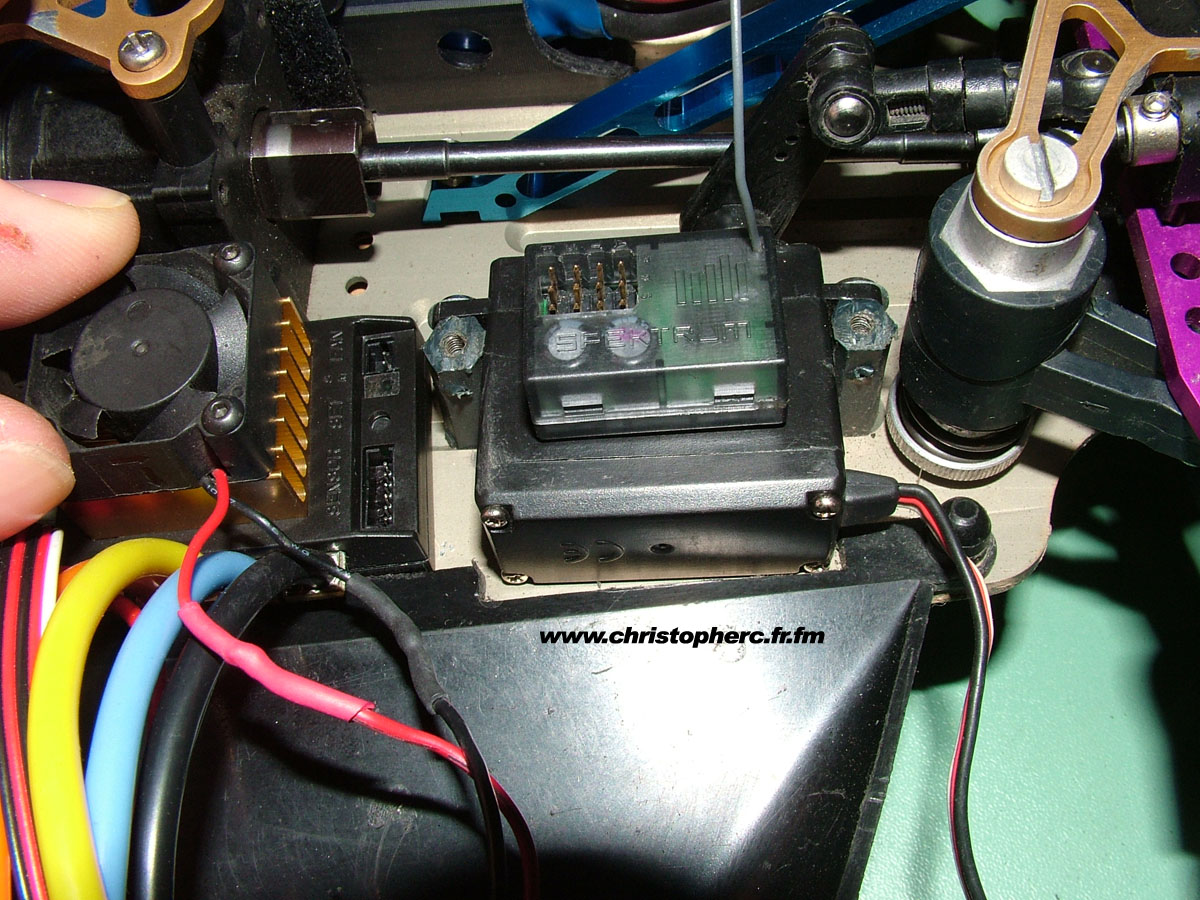




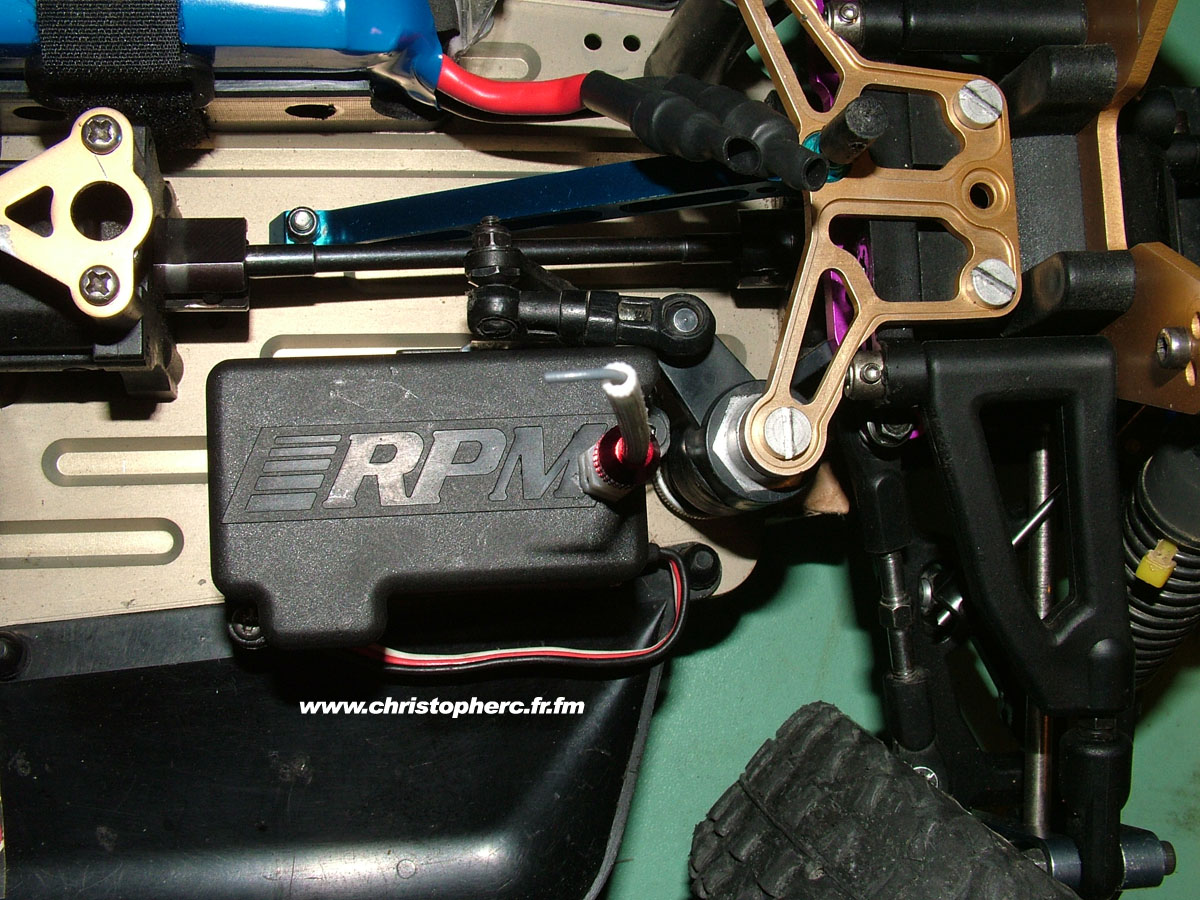
Propre, efficace et rien qui dépasse, un montage comme j'aime

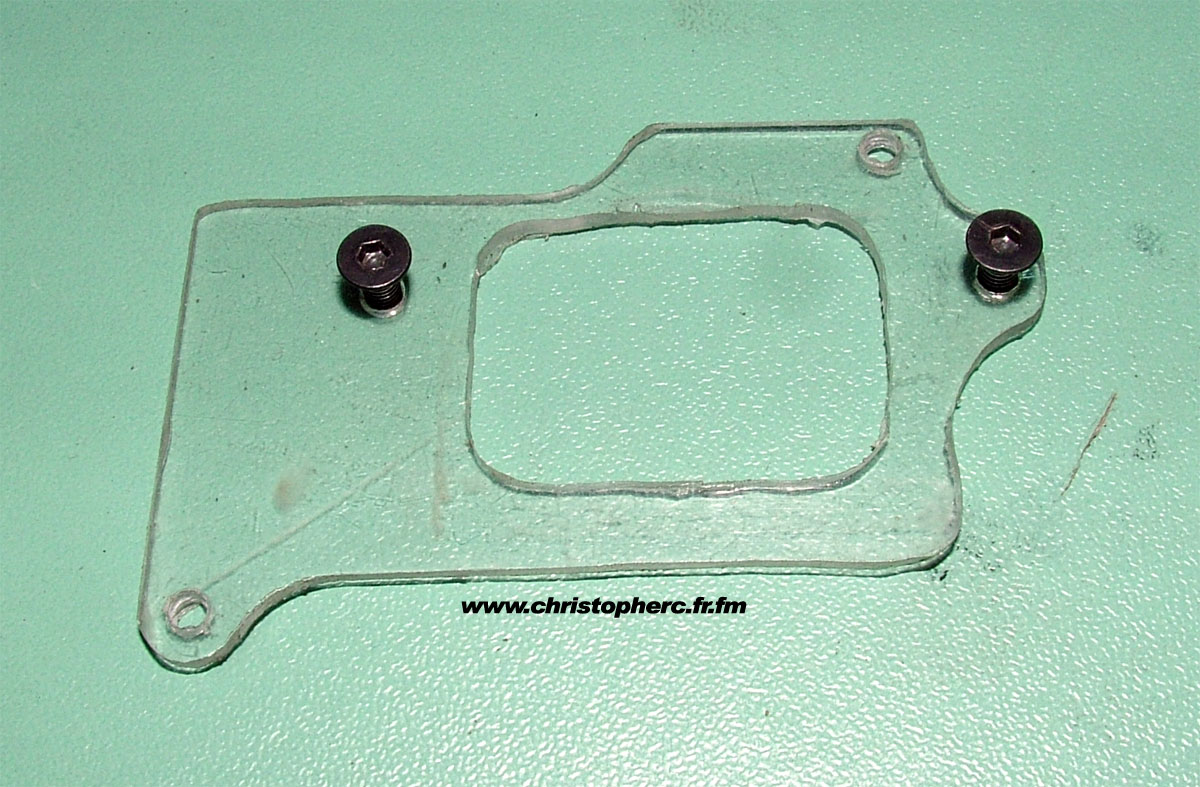
Bien que cela fonctionnait à merveille, j'ai remplacé le Ubec par un pack Lipo 2S 7,4V 850 mA pour avoir un servo plus rapide, il est fixé sur une plaque en lexan elle même fixées sur le palier central arrière, le tout est maintenu par un collier sur le renfort arrière :

Très important, notez la protection lexan pour ne pas venir rogner les gaines de prises et provoquer un court circuit :

La p'tite astuce CBRacing qui coute pas un rond et peut sauver votre matos, avec deux morceaux de gaine thermo faites vous des bouchons à placer sur les prises PK de votre pack quand ça sert pas, ainsi aucun risque de court circuit, au passage évidemment les prises sont détrompées

Bilan de la config 8XL + contro CBRacing 120A et Lipo 4S Hypérion, ça marche vraiment bien tout en étant parfaitement exploitable, à venir test avec contro CBRacing 150A et différents moteurs : Neu 1515 1Y 2200 Kv, Feigao 540L 6.5T 3000 Kv avec axe de 5 mm , moteur 540XL CBRacing 8 et 10 tours et peut être aussi une nouvelle répartition des masses, à suivre ...
Pour le fun j'avais testé de monter le gros 4576 et ça passe sur un support RC Monster et ce sans modifs !

N'hésitez pas si vous avez des questions ou des remarques.
@+
Christophe



